在液压伺服系统的世界里,阀、油缸、油泵看得见摸得着,但真正决定它们“听不听话、稳不稳定”的,往往是藏在控制器里的那几行算法。PID就是其中最常见、也最容易被说得“高大上”的一个名词。其实,把它拆开来看,你可以把PID想象成一个很有经验的“液压管家”:会记住系统过去表现怎么样,盯着现在偏差有多大,还能根据变化趋势大致“猜到”未来会往哪儿跑。正是依靠这份对“过去—现在—未来”的综合判断,液压系统才能在各种工况下,既能快速响应,又能相对平稳地达到你想要的压力、速度或位置。
一、什么是PID
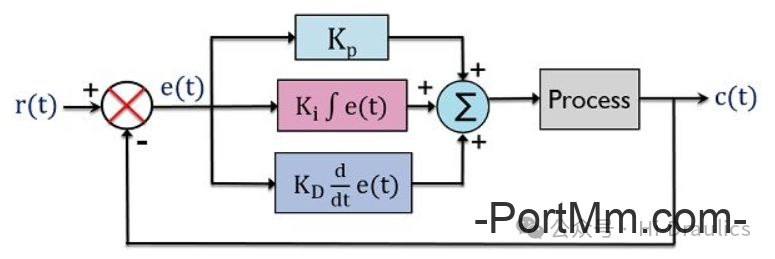
图1 PID控制器框图
首先,了解PID这个缩写词非常重要。它代表比例-积分-微分(Proportional-Integral-Derivative),是系统设定点用于实时纠正误差的控制方法。您可能会看到P、PI、PD 或 PID与特定系统的控制器相关联——这些字母表示正在或未来应用哪些控制方法。
-
P:比例(Proportional)——专注“当下”
-
I:积分(Integral)——记得“过去”
-
D:微分(Derivative)——预判“未来”
在液压伺服系统里,PID常被用来控制以下三个关键量:
-
压力:稳不稳?会不会忽高忽低?
-
速度:太慢,还是太猛?
-
位置:能不能稳稳地停在该停的地方?
一句话:PID 就是一个根据“过去的表现”、“现在的偏差”、“未来的趋势”来调节液压系统的算法,让系统又快、又稳、又准。
二、三种“时间观”的控制逻辑
1、P(比例)——专注“当下”
P关心的是:这一刻,你偏差了多少。
-
当前误差大→ 输出就大
-
当前误差小→ 输出就小
就像你关门:门缝很大,你就用力推;门缝很小,你就轻轻推。
优点:反应快,有误差立刻动作。
缺点:只看“现在”,不记旧账,所以经常会永远差那么一点点(稳态误差)。
所以说:P是一个“活在当下”的人:你现在离目标远不远,我就现在多用点力,至于之前怎么样、之后会怎样,我一概不管。
2、 I(积分)——记得“过去”

I关心的是:过去这段时间里,你持续积累了多少误差?
-
误差持续时间一长,积分值就一点点“攒”起来
-
攒到一定程度,控制器就会拼命纠正,直到误差趋近于0
依旧关门:你发现门老是差一条小缝,总是关不严,看久了你会烦,一把稍微用大力,把门“按死”关上。
优点:能消除那种长期存在的小误差,让系统真正“准准到设定值”。
缺点:记“过去的账”记得太狠,会:
-
反应变慢;
-
容易超调、来回振荡。
所以说:I是一个“念旧”的人:你以前欠下的误差,我都记着,迟早要你还清。
3、D(微分)——预判“未来”
D关心的是:误差变化的趋势,也就是“马上要发生什么”,而不是有多少误差。
-
如果误差正在快速减小,说明马上就要达到目标
-
D会提前帮你“刹车”,避免冲过头
叒是关门:眼看门快要关上了,而且速度还挺快——你会本能地提前放轻力道,不让门“砰”地一声撞上。
优点:抑制超调,减少振荡,让系统更稳定。
缺点:对信号噪声很敏感。传感器稍微抖一下,D 太大就会跟着瞎紧张,导致控制量乱跳。
所以说:D是一个“审时度势”:你现在往哪儿走、走多快,我心里有数,提前做好准备,不让你乱冲。
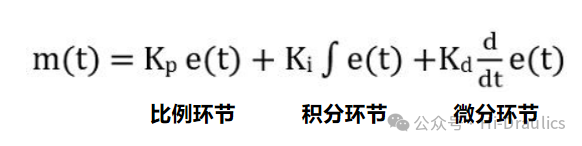
三、三位一体:一位“时间三观”俱全的管家
把 P、I、D 组合起来,你就得到了一个这样的控制器:
-
P:处理“此时此刻”的误差(现在)
-
I:清算“长时间积累”的偏差(过去)
-
D:根据变化趋势做预测(未来)
把它放到液压系统里,效果是这样的:
-
启动时:快速追上设定的压力/速度/位置 → 靠P
-
稳定后:把最后那一点残余偏差也消灭掉→ 靠I
-
全周期内:不让系统乱抖、乱冲、振荡→ 靠D
形象一点说:
-
只用P:像一个干活很冲但有点毛躁的人,反应快但不精细。
-
加上I:像一个有记性的人,知道自己总是“差一点”,会想办法补上。
-
再加D:像一个有预判能力的人,知道什么时候该收力、什么时候该稳住,绝不冲过头。
四、PID在液压伺服系统中的作用
PID在液压伺服系统中的作用:
-
让系统“敢动”:P把你从远处快速拉到目标附近,保证有足够的力和速度。
-
让系统“收得住”:D防止你到了附近还猛冲,减少振荡和过冲。
-
让系统“最终很准”:I把最后那一点点残余误差消掉,不再永远差一点。
以阀控缸为例:
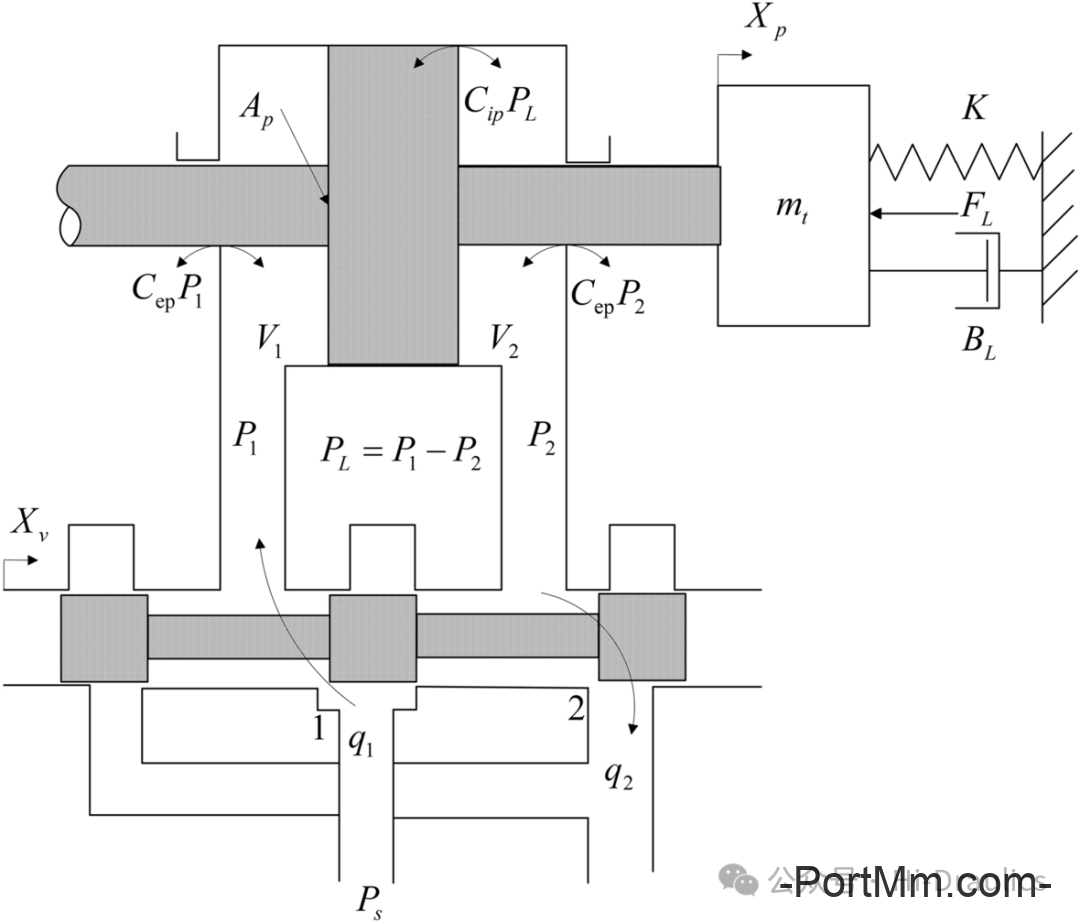
图2 阀控缸系统简化
1、位置控制
通常用闭环位置控制(通常带速度、加速度前馈):
-
目标是“到哪儿、停在哪儿”,对最终位置误差最敏感。
-
位置环(外环)+ 速度环(内环),让系统既能准确到位,又不过分抖动。
因此,位置控制最怕:过冲、振荡、不到位,需要:
-
P:提供误差驱动增益,如果被控油缸固有频率很低,还可以对P控制器输出进行滤波。
-
D:提供“阻尼”,抑制振荡、减少冲过头,改善P控制器的控制品质。
-
I:消除长期的小位置偏差(稳态误差):在许多液压位置控制系统中,为了避免积分作用引起超调或振荡,位置环常采用P或PD控制,而将I放在内层的速度环中。但如果低速下,动静摩擦力交替导致系统存在长期的位置偏差(如爬行或静差),也可以谨慎引入位置积分克服粘滑效应,并配合抗积分饱和措施。
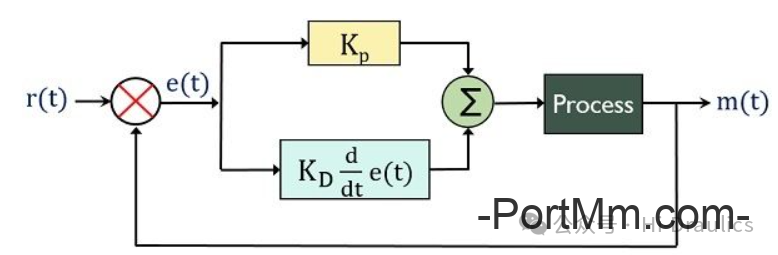
图3 PD控制器框图
因此,很多伺服系统会在位置环中采用P或PD控制,而把I放到下一级的速度环中。
2、速度控制
通常用闭环速度控制(速度环),外环可能是位置或力:
-
目标是“匀速、跟速”,对速度误差最敏感。
-
常见结构:外环位置 / 力 → 给定速度 → 速度PID → 驱动。
一般多采用PI控制:
-
P:决定跟随速度、加速度(增益)
-
I:消除速度的稳态误差
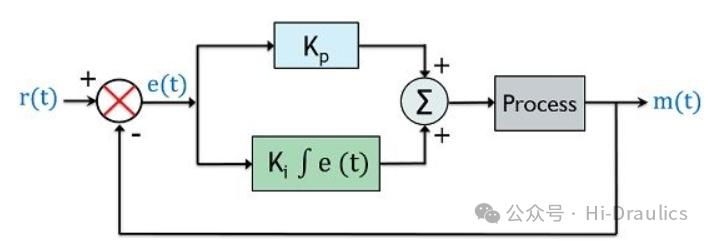
图4 PI控制器框图
大多数情况下,速度反馈信号相对平滑,系统惯性+摩擦提供了一定“自然阻尼”,因此没有D控制器也能稳定工作。当然,如果遇到负载变化大、系统弹性强、对动态性能要求高的工况时,可以加一点D用来抑制突然加减速时的振荡和超调。
3、力控制
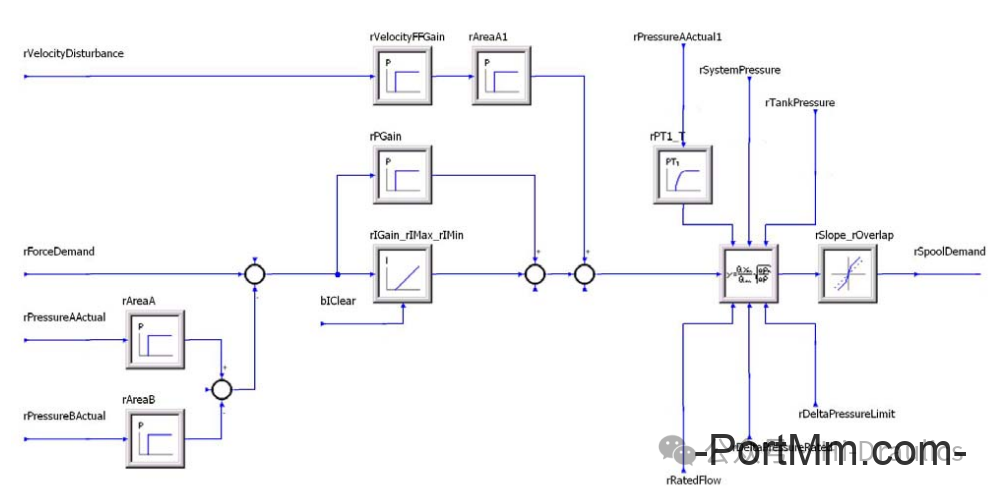
图5 MOOG控制器力控制模块
通常用闭环力/压力控制(力环),内层是流量/速度或阀口开度:
-
目标是“多大力、多大压力”,对输出力/压力的大小与稳定性最敏感。
-
常见结构:力/压力 PID → 位置/流量/阀口开度,通过改变位置或流量来调节力。
-
应用如压装、伺服压机、张力控制等,要的是“力到位”,位置、速度只是手段。
一般多采用PI控制:
-
I:很关键,用来消除在不同负载下的稳态力/压差
-
P:提供“硬度”(刚度),响应够快
当系统刚度较低(大容腔、长管路、多软管等)、力/压力响应速度要求高时,可加入一点D来稳定系统。
五、如何调节PID
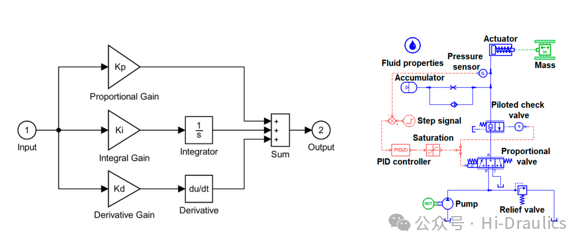
图6 利用AMESim、Simulink等仿真软件计算
在液压系统现场调节,可以借用白志刚老师在《自动调节系统解析与PID整定》一书中的顺口溜:
参数整定找最佳,从小到大顺序查。
先是比例后积分,最后再把微分加。
曲线振荡很频繁,比例度盘要放大。
曲线漂浮绕大弯,比例度盘往小扳。
曲线偏离回复慢,积分时间往下降。
曲线波动周期长,积分时间再加长。
曲线振荡频率快,先把微分降下来。
动差大来波动慢,微分时间应加长。
理想曲线两个波,前高后低四比一。
一看二调多分析,调节质量不会低。
(注:“比例度盘”即“比例增益”)
但是,什么是“绕大弯”?怎样算“快”,怎样算“慢”?对于理论能力较强的朋友,可以通过建立数学模型,借助AMESim、Simulink等仿真软件,经过计算获得参考值,再进行现场实践。而对于动手能力强、现场经验丰富的朋友,则可以根据现场工况,遵循“先是比例后积分,最后再把微分加”的步骤,通过获取参数曲线进行进一步调节。
相关阅读:
电液伺服系统计算(一)——如何计算位置控制伺服回路的允许环路增益
如果喜欢我的文章,请点赞、分享和推荐。如有疑惑,可以在下方留言板和我一起探讨。
如需转载,请注明出处。
更多精彩内容,请关注、收藏、标星Hi-Draulic,探索流体动力的乐趣。
——Hydraulics, Unlocked.
